
IntEx: Integrated Acting, Planning and Execution
ICAPS'23 Workshop
Prague, Czech Republic
July 9, 2023
Aim and Scope of the Workshop
Automated planners are increasingly being integrated into online acting systems. The integration may, for example, embed a domain-independent temporal planner in a manufacturing system (e.g., the Xerox printer application) or autonomous vehicles (e.g., a planetary rover or anunderwater glider). The integration may resemble something more like an “acting and planning stack” where an automated planner produces an activity or task plan that is further refined by an actor before being executed by the execution platform of the actor, such as, a reactive controller (e.g., robotics). Or the integration may be a domain-specific policy that maps states to actions (e.g., reinforcement learning). Models for planning and execution can be same or different; the planning model can define context-dependent actions schema for online (re-)planning or can just specify flexibility to be handled separately at execution time. Online learning may or may not be involved, and may include adjusting or augmenting the model, determining when to repair versus replan, learning to switch policies, etc. A specific focus of these integrations involves online deliberation and managing the execution of actions, bringing to the foreground concerns over how much computational effort planning should invest over time.
In any of these systems, a planner generates action sequences that are eventually dispatched to an executive, yet taking action in a dynamic world rarely proceeds according to plan. When planning assumptions are challenged during execution, or some dynamic events occur, it raises a number of interesting questions about how the system should respond and which is the scope of online deliberation versus execution. Is the “acting” side of the system responsible for a response or the “planning” side? Or do the two need to cooperate and how much? When should the activity planner abandon or preempt the current goals? Should the task planner repair a plan or replan from scratch? Should the executive adjust its current policy, switch to a new one, or learn a new policy from more relevant experience?
The seventh edition of the workshop on Integrated Planning, Acting, and Execution (IntEx) aims: (1) to provide a forum for discussing the challenges of integrating online planning, acting, and execution, and (2) to assess the potential for holding an integrated execution competition at ICAPS.
Topics of Interest
- online planning, acting, and execution
- position papers, benchmarks, or challenge problems for integrated execution
- improving planning performance from execution experience
- anytime or incremental planning
- discussions of plan dispatching or plan executives
- execution monitoring; comparing replanning, plan repair, re-goaling, plan merging
- managing open worlds with closed-world planners; model learning from experience
- determining an observation policy; policy switching; incremental policy adjustment
- modelling, languages and knowledge engineering for interleaved planning and execution
- architectures and application for integrated planning and execution
- execution monitoring, mixed-initiative on-line re-planning and execution
List of Accepted Papers
- Timothy Darrah, Marcos Quinones-Grueiro, Gautam Biswas and Jeremy Frank. A Health-Aware Framework for Online Replanning of Unmanned Aerial Vehicles Missions under Faulty Conditions
- Jérémy Turi, Arthur Bit-Monnot and Félix Ingrand. Enhancing Operational Deliberation in a Refinement Acting Engine with Continuous Planning
- Jeremy Frank, Gordon Aaseng, Minh Do, Chuck Fry and Adam Sweet. Integrating Planning, Diagnosis and Execution for Vehicle Systems Management
- Annita Vapsi, Daniel Borrajo and Manuela Veloso. CLAPLEX A Control Language and Architecture for Planning and Execution
- Victoria Jane Armstrong and Christian Muise. The Generalizability of FOND Solutions in Uncertain Environments
Keynote Talk: Dynamic Targeting to Improve Science Return
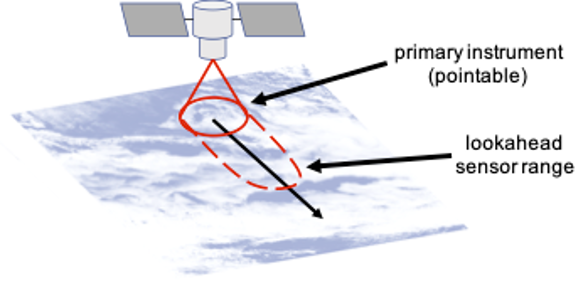
Dynamic Targeting (DT) is an emerging concept in which data from a lookahead instrument is used to rapidly intelligently reconfigure and point a primary instrument to enhance science return. For example, in the Smart Ice Hunting Radar (SMICES) a forward-looking radiometer is used to detect deep convective ice storms which are then targeted using a radar. In other concepts, forward-looking sensors are used to detect clouds so that a primary sensor can avoid them. To this end, we have developed several algorithms from Operations Research and Artificial Intelligence/heuristic search to point/reconfigure the dynamic instrument. We present simulation studies of DT for these concepts and benchmark these algorithms to show that DT is a powerful tool with the potential to significantly improve instrument science yield. We will also discuss plans to fly dynamic targeting.
About the Speakers:
Alberto Candela

Dr. Alberto Candela is a Member of Technical Staff in the Artificial Intelligence Group, Planning and Execution Section, at the Jet Propulsion Laboratory, California Institute of Technology. He holds a B.S. with Highest Honors in Mechatronics Engineering from Instituto Tecnológico Autónomo de México (ITAM). He completed an M.S. and Ph.D. in Robotics at Carnegie Mellon University, working with Prof. David Wettergreen on new methods for science-driven autonomous robotic exploration. His methods have been deployed on rovers and drones in remote locations around the world, including the Martian-like Atacama Desert. After arriving at JPL, he has worked on Dynamic Targeting, advanced machine learning for imaging spectroscopy, and spacecraft autonomy for small body mission concepts.
Steve Chien

Dr. Steve Chien is a JPL Fellow, Senior Research Scientist, and Head of the Artificial Intelligence Group, at the Jet Propulsion Laboratory, California Institute of Technology. He has led the deployment of AI software to a wide range of missions including: Autonomous Sciencecraft on EO-1, Earth Observing Sensorweb, WATCH on MER, IPEX, ESA’s Rosetta, ECOSTRESS, and OCO-3. He is currently supporting the development of an onboard scheduler for the Mars 2020 rover mission as well as formulating future AI-driven space mission concepts. Dr. Chien has received numerous awards for these efforts. In 1995 he received the Lew Allen Award for Excellence. He has been recognized four times in the NASA Software of the Year competition (1999, 1999, 2005, and 2011). He has received four NASA Medals for his work in AI for Space (1997, 2000, 2007, 2015). In 2011 He was awarded the inaugural AIAA Intelligent Systems Award, for his contributions to Spacecraft Autonomy. In 2015 He was awarded a JPL Magellan Award as well as the NASA Exceptional Achievement Medal for his contributions to automated science scheduling for ESA's Rosetta mission. Dr. Chien has supported the Office of the Secretary of Defense, the Defense Sciences Board studies on Autonomy, and 2018-2021 he served as a commissioner on the National Security Commission on Artificial Intelligence.
Workshop Schedule
The IntEx workshop will be held on July 9, 14:00 to 17:05 local time at Prague, Czech Republic.
Important Dates
- Paper submission deadline: April 7, 2023 AoE
- Notification of acceptance/rejection: May 1, 2023
- Camera-ready deadline: May 22, 2023 AoE
- Workshop: July 9, 2023
Submission Details
Submissions may be regular papers (up to 8 pages plus references) or short position/challenge papers (up to 4 pages plus references). All papers should conform to the AAAI formatting guidelines and style (https://aaai.org/Publications/Templates/AuthorKit23.zip).
The papers must be submitted in a PDF format via EasyChair system (https://easychair.org/my/conference?conf=intex2023). Submissions will be reviewed by at least two referees.
We welcome existing publications from other venues that are appropriate for discussion at this workshop. Please note in the title area if this work is already accepted at another venue. If the work is under review at another venue (e.g., IJCAI-2023) please notify the organizers so we can avoid potential reviewing conflicts.
Workshop Committee
Oranizing Committee
- Sunandita Patra, JPMorgan AI Research, sunandita.patra at jpmchase.com
- Wiktor Piotrowski, Palo Alto Research Center, wiktorpi at parc.com
- Mark “Mak” Roberts, Naval Research Laboratory, mark.roberts at nrl.navy.mil
- Tiago Vaquero, Jet Propulsion Laboratory, vaquero at jpl.nasa.gov
Program Committee
- Andrea Micheli, Fondazione Bruno Kessler
- Jeremy Frank, NASA
- Mark Roberts, Naval Research Laboratory
- Marco Roveri, Department of Information Engineering and Computer Science - DISI
- Michael Floyd, Knexus Research
- Oscar Lima, German Research Center for Artificial Intelligence - DFKI
- Roni Stern, PARC/Ben-Gurion University of the Negev
- Ron Alford, The MITRE Corporation
- Riccardo De Benedictis, CNR - National Research Council of Italy
- Shakil Khan, University of Regina
- Sunandita Patra, JPMorgan AI Research
- Wiktor Piotrowski, Palo Alto Research Center